
【ページコンテンツ:気になる箇所へのジャンプも可】
人間の関節の大部分は「回転運動」によって動作が生み出されています。
運動の原理を知っておくことは、日常生活や競技パフォーマンスを高める上で非常に重要です。
今回は「筋肉の3大テコ」についてシンプルにまとめてみようと思います。
回転運動の基本:トルク
テコの話に入る前に、まずは「トルク」について説明しましょう。
トルクというのは「回転力」のことです。
これは「力×モーメントアーム」の計算式によって導き出されます。
<*詳しく知りたい方へ(サラッと理解したい方は読み飛ばして次へ)>
“力”とは「質量×重力加速度」であり、単位はN(ニュートン)です。
例えば10kgのダンベルを支える力は「10kg×9.8m/s2=98N」となります。
また“モーメントアーム”というのは、支点からの距離(長さ)のことです。
“トルク”というのは「力×モーメントアーム」によって導き出されるため、支点から1m離れた部分に10kgのダンベルがある場合は「98N×1m=98Nm」となります。
1Nm(ニュートンメートル)=1J(ジュール)ですので、この時のトルク(固定状態)の大きさは「98J」となります。
つまり、重くなるか or 遠くなるかによってトルクの大きさは変化します。
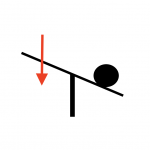
例えば、下のイラストをご覧ください。

左側(青)は、支点から5cmのところに10kgの重りがあります(「10kg×5cm」)。
また右側(赤)は、支点から50cmのところに1kgの重りがあります(「1kg×50cm」)。
「10kg×5cm」も「1kg×50cm」もトルクは同数値であるため、上のテコはピタッと釣り合います。
まずはこの関係性を理解することが、筋肉のテコ構造を学ぶ上では重要になります。
第1のテコ
では「第1のテコ」から見ていきましょう。
このテコは最もシンプルな構造であり、支点を挟んで重り(抗力)と押す力(筋力)が反対方向に存在している形です(シーソーモデル)。

もしこの2つの力が支点から同距離であれば、重い方に傾きます。
またもしこの2つの力が同じ重さであれば、支点から遠い方に傾きます。
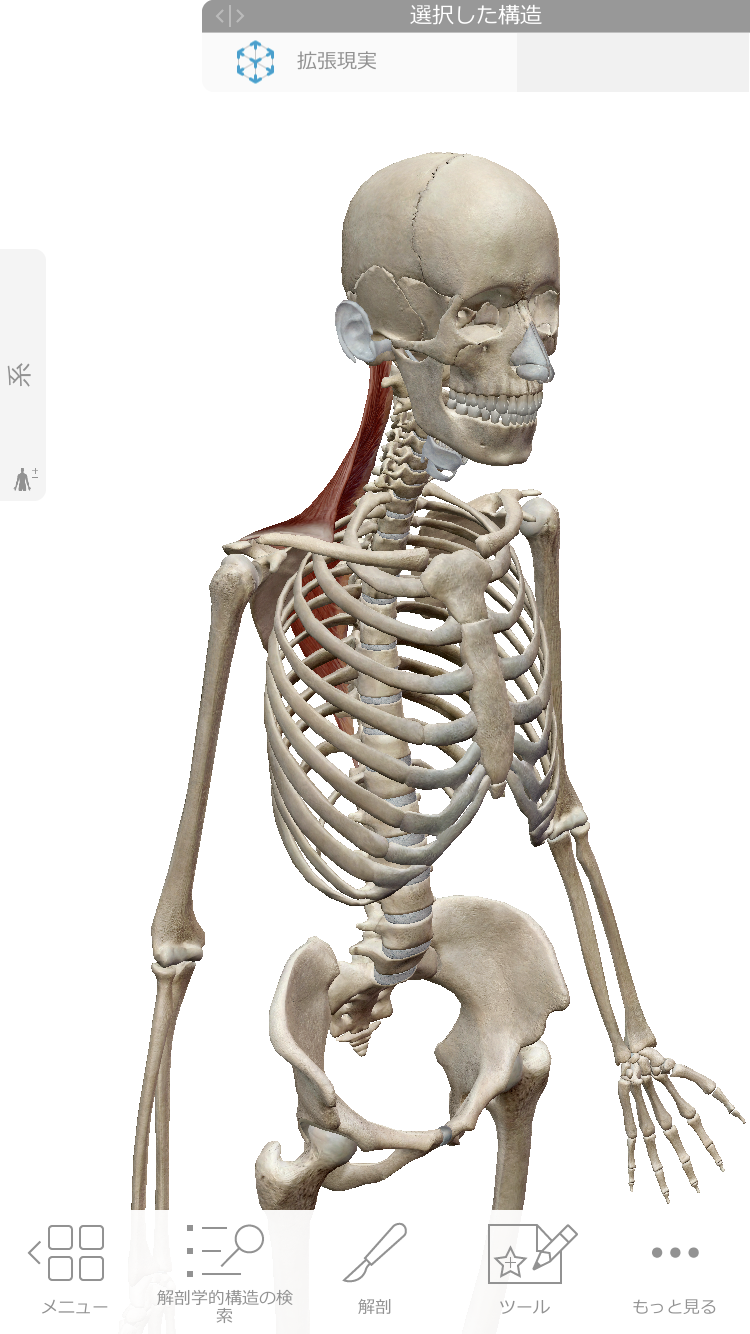
人間の体では「肘の伸展動作(上腕三頭筋)」が代表的です。
上腕三頭筋の収縮によって尺骨が引き寄せられ、肘が伸びようとしていますね。
この時、抗力が”どこにかかるか”が重要です。
上のイラストを見ればわかるように、肘の支点と上腕三頭筋の停止は非常に近い位置関係にあります(これはすなわち「筋力のモーメントアームが小さい」ということを意味します)。
もし抗力が肘から遠いところ(例えば手の甲や指先)にかかってしまえば、抗力のモーメントアームはとても大きくなります。
すると筋力と抗力を釣り合わせるためには、筋力は抗力の何十倍も力発揮をしなければならなくなります。
第2のテコ
続いては「第2のテコ」です。
これは支点から見て、重り(抗力)と押す力(筋力)が同じ方向にあります。
その上で押す力(筋力)のほうが支点から”遠い”という構造です。
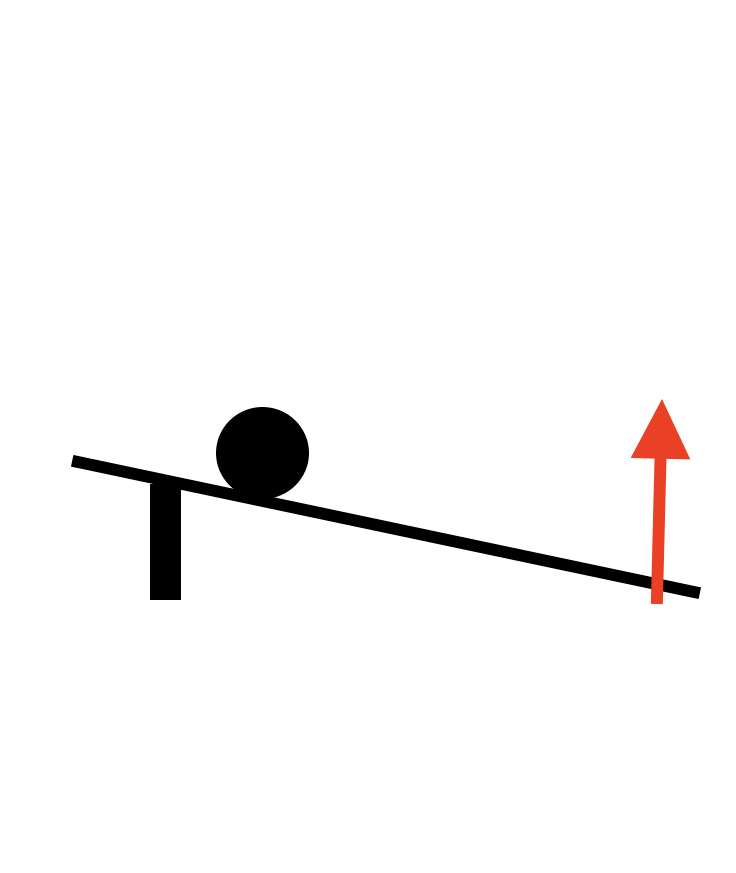
筋力のほうが遠いわけですから、実際の重さ(抗力)よりもはるかに小さな力でひょいとお持ち上げられます。
人間の体では「ふくらはぎ(腓腹筋)」の構造が代表的です。
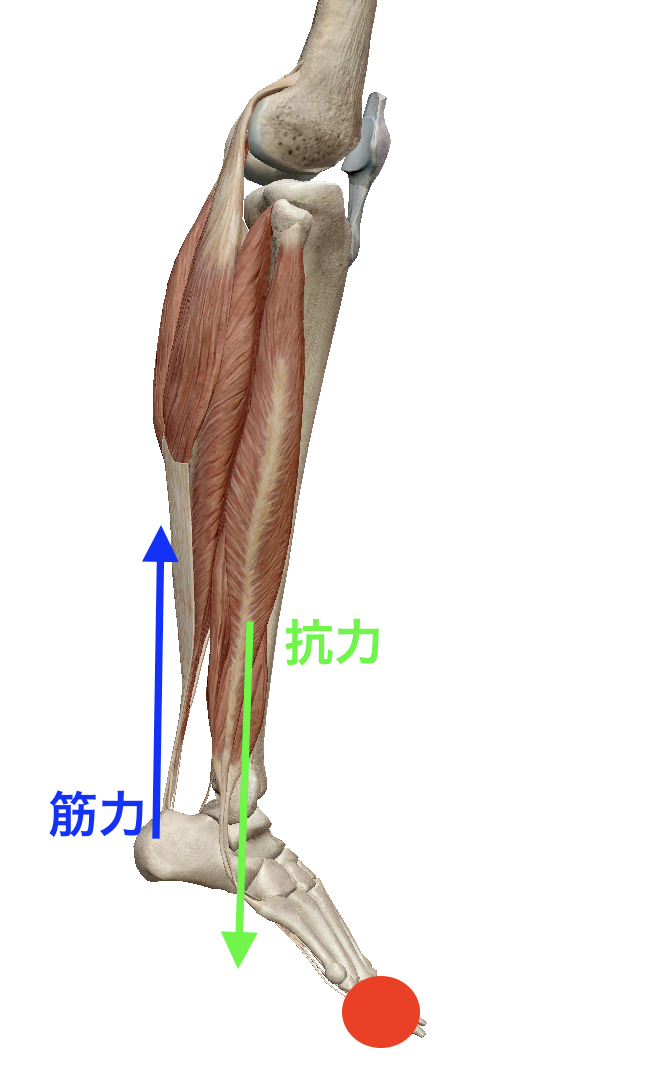
つま先が支点、脛骨に抗力(体重)、アキレス腱を経て腓腹筋に筋力がかかります。
ジャンプ動作やランニング動作では、体重の2〜3倍の負荷がかかることもあります。
その負荷に耐え、なおかつその負荷以上に力発揮するためにはこういった構造(筋力のモーメントアームが大きい)が必要になるわけです。
第3のテコ
最後が「第3のテコ」です。
これも「第2のテコ」と同じように、支点から見て重り(抗力)と押す力(筋力)が同じ方向にあります。
ただ「第3のテコ」は、筋力の方が支点に”近い”という構造です。

モーメントアームが小さい分だけ、筋力は重さ(抗力)以上に力を発揮する必要があります。
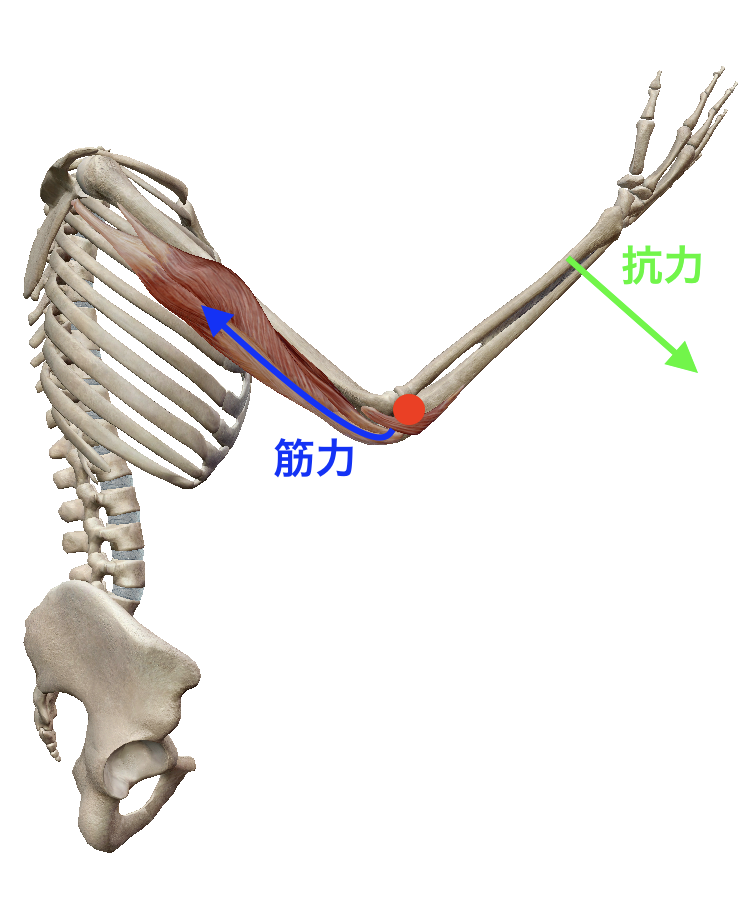
実際の筋肉でいうと「肘の屈曲動作(上腕二頭筋)」が代表例です。
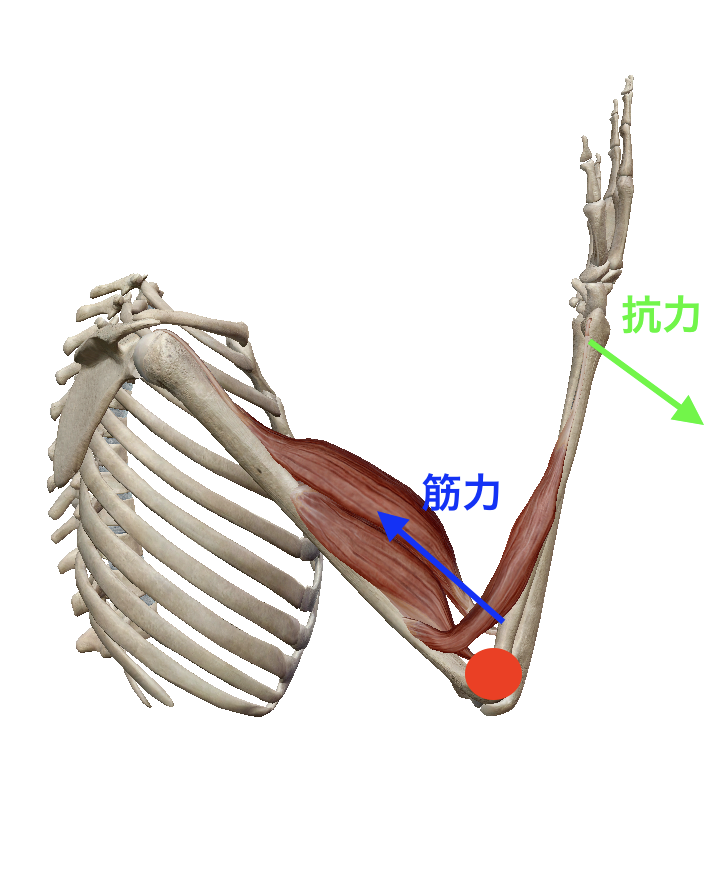
上腕二頭筋の停止が、肘関節の中心近くに付着しているのがお判りいただけるかと思います。
肘を曲げて重りを持ち上げるという動作は、実際の重り以上の負荷が筋肉にかかっているわけですね。
まとめ
今回は筋肉のテコ構造についてまとめてみました。
次回はこの内容をより深堀してみようと思います。
では今日も最後までお読みいただきありがとうございました。
<セラピストの皆さんへ>
トップセラピストに必要な“実践的ノウハウ”をまとめています。
==
また現場で活躍するセラピストに向けた“人気コラム”も書いています。
→【セラピストサロン】
ぜひ覗いてみてください。
シェア・ブックマークも忘れずに
「また後で見に来よう!」で見失わないように、シェア・ブックマークボタンをぜひご活用ください。
















コメントを残す